





Robo Darts
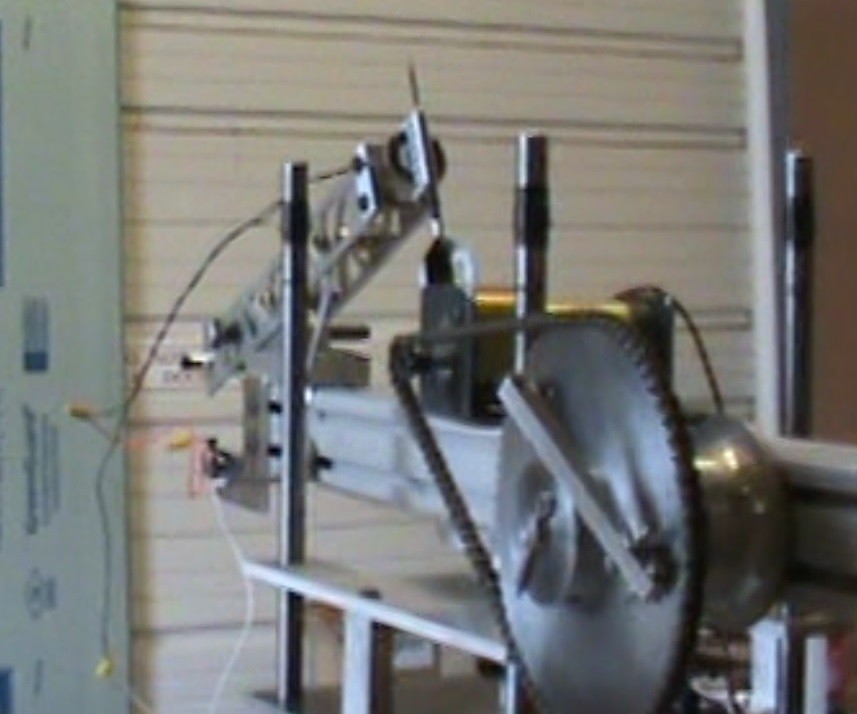
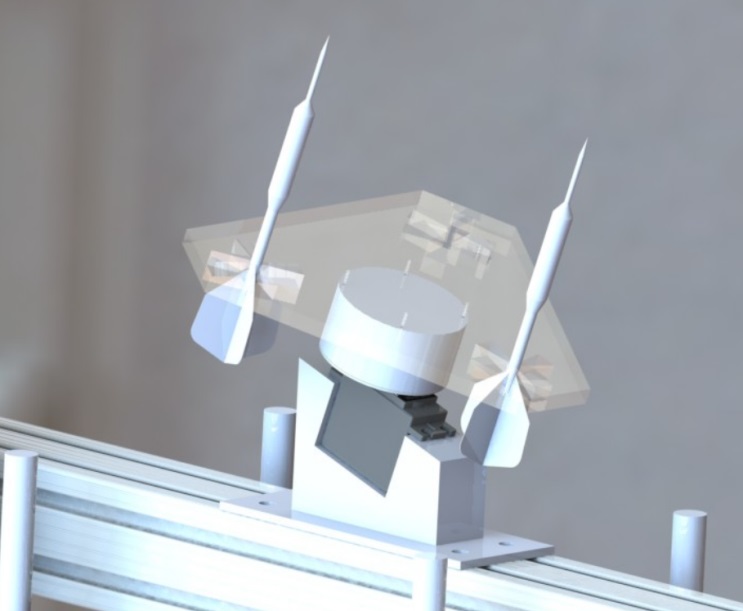
For my senior capstone project in design of mechanical systems at Union College, I was part of a team that designed and built a dart-throwing robot. At the end of the course, our robot competed (and surprisingly beat) several human players in a game of darts. My specific role was developing the base positioning system to align the dart with the bulls-eye, as well as the open-loop control scheme.
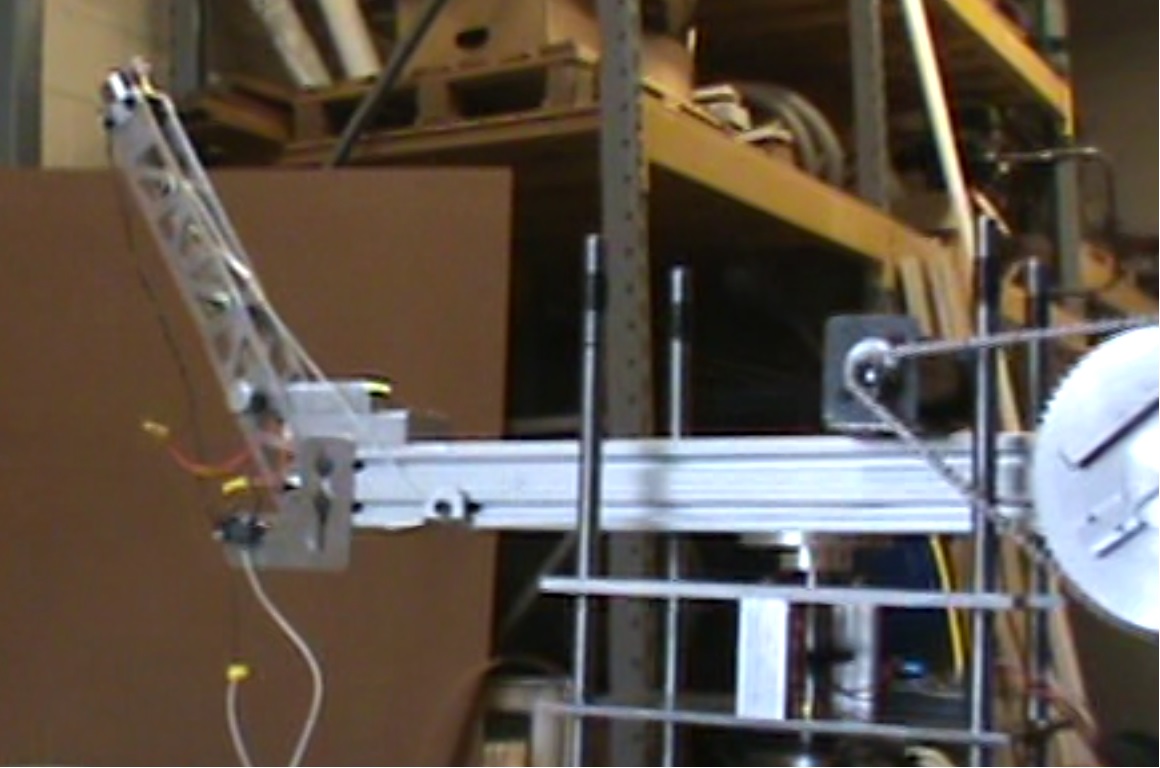
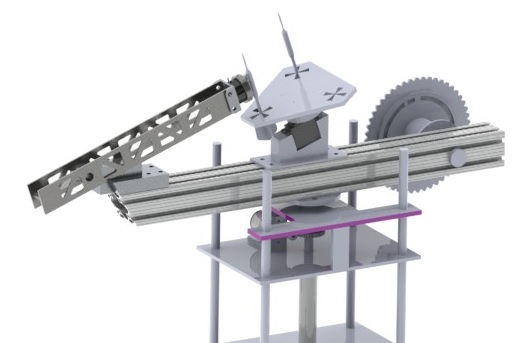
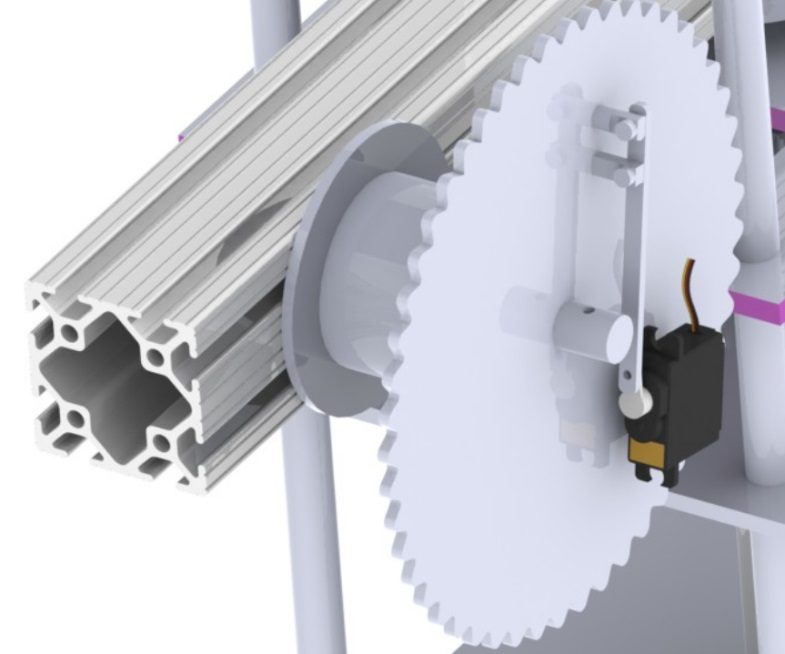
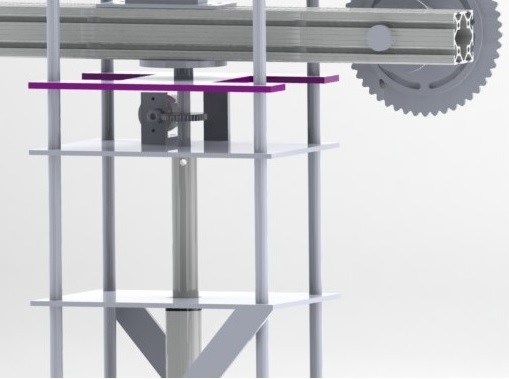
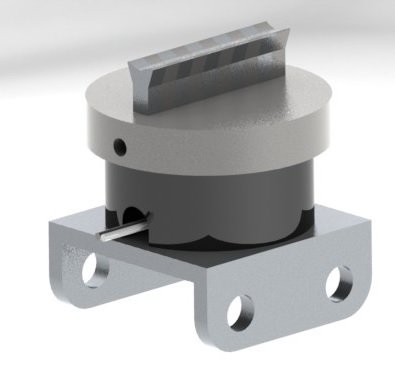
The positioner consisted of 2-DOF (revolute and prismatic joints) to align the throwing arm with the target – both actuated via DC-brushed motors and hobby motor drivers. A wireless remote control was programmed to position and throw the dart at various speeds and trajectories.